Vision
Germany’s official goal for 2030 is to get 65% of its electricity from renewable energies. With this in mind, a steady increase in the installation, maintenance and repairation of wind turbines is being expected. Visual inspection of the wind turbine blades is an important task that is performed once or twice a year and is known to be tedious and time consuming. As drone technology matures and becomes more reliable, companies that produce, maintain and repair wind turbines are slowly introducing drones directly or hiring third-party companies to use drones to perform the visual inspection.
There are 30,000 onshore wind turbines in Germany alone. Operations and maintenance companies are always on the lookout for new technologies that will improve their service quality, reduce costs and improve safety in the workplace. The aim of the start-up IRS (Intelligent Robotic Services) is to expand existing inspection and maintenance services for wind turbine blades with functions such as autonomous visual inspections and conductivity tests. With these functions, the wind turbine blades of onshore/offshore wind farms could be inspected more frequently with very little effort and time and reduce the operating costs of these companies.


We aim to achieve the pre-planned coverage of turbine blade surfaces under the supervision of an operator with minimal training
Our approach
Traditionally, visual inspections of wind turbine blades are performed by professional rope access. As the drone industry advances, tasks such as visual inspection are traditionally performed by a certified pilot who is required to carry a set of rechargeable LiPO batteries in the field. LiPo batteries that power drones are expensive, heavy, require maintenance, have limited performance and have a short lifespan.
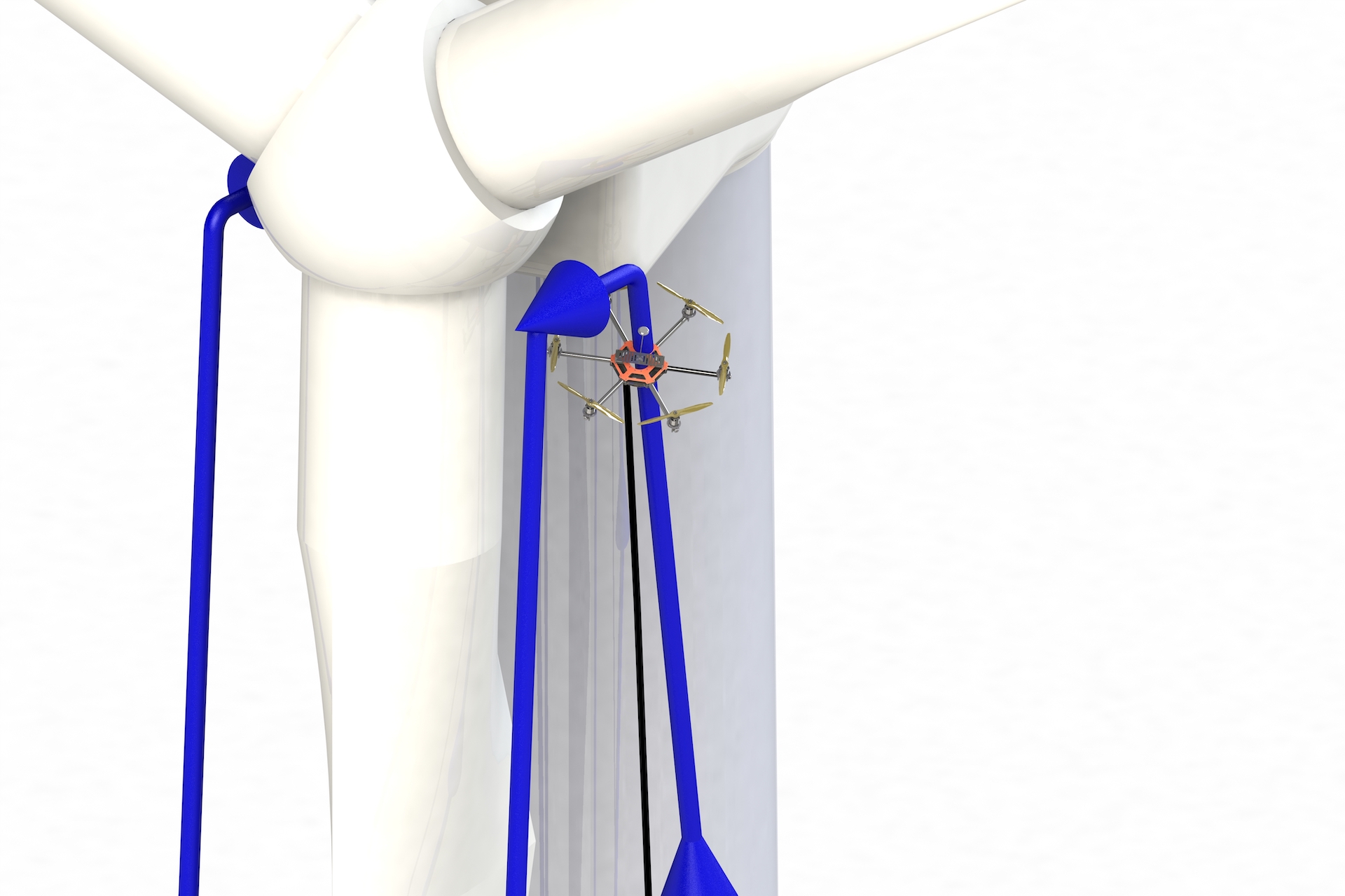
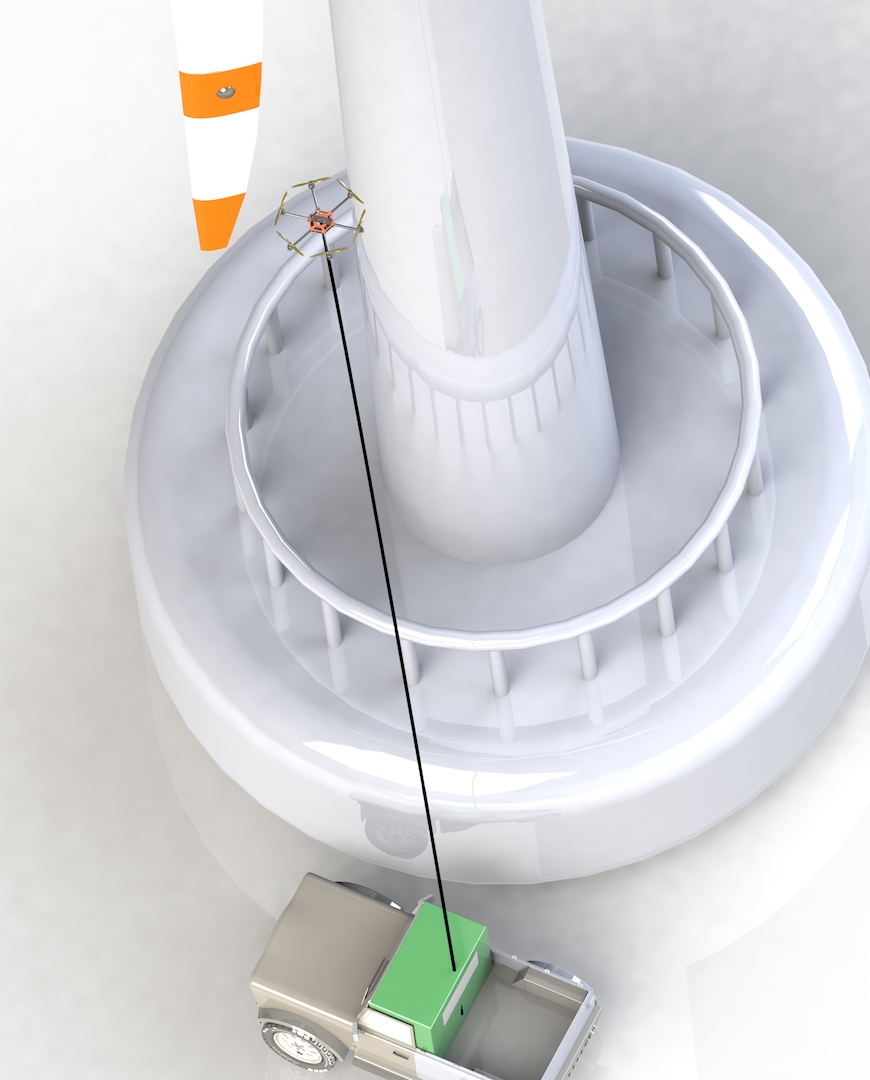
IRS aims to achieve the pre-planned coverage of turbine blade surfaces under the supervision of an operator with minimal training. In addition, the dependency on the LiPo batteries is eliminated by introducing electricity through the cable. Using the latest computer vision algorithms, an open source autopilot stack and sensor fusion techniques, the visual inspection mission can be carried out with complete autonomy while the drone is powered via a cable (tether) from the mobile ground station.
The following offers are planned:
- Service: inspection service per wind turbine
- Tether management system and autonomous inspection software stack only (customers with existing drones): hardware and software first purchase and subscription for maintenance
- Drone, tether management system and autonomous inspection software stack: hardware and software first purchase and subscription for software maintenance
Product and service
The product and service are characterised by the following unique selling points:
- Reduced operator training costs and time
- No replacement collection of LiPO batteries (usually one for each inspection)
- Increased number of inspections carried out per day from 2-4 (manual) to 10-12 (autonomous with tethered drone system)
- Space for new inspection devices on the drone due to increased payload capacity
Industry and market
Inspection and maintenance companies for wind turbines are the target customers to whom we offer the service or the complete system as a product with maintenance.



